Loading...
Searching...
No Matches
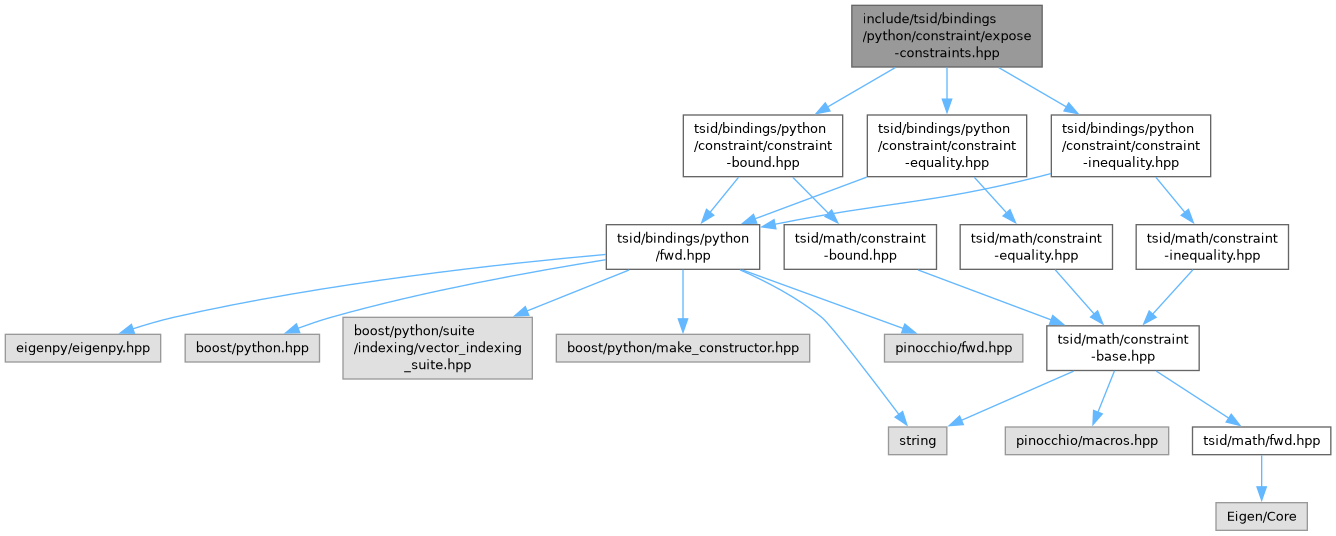
expose-constraints.hpp File Reference
#include "tsid/bindings/python/constraint/constraint-bound.hpp"#include "tsid/bindings/python/constraint/constraint-equality.hpp"#include "tsid/bindings/python/constraint/constraint-inequality.hpp"Include dependency graph for expose-constraints.hpp:
Go to the source code of this file.
Namespaces | |
| namespace | tsid |
| namespace | tsid::python |
Functions | |
| void | tsid::python::exposeConstraintBound () |
| void | tsid::python::exposeConstraintEquality () |
| void | tsid::python::exposeConstraintInequality () |
| void | tsid::python::exposeConstraints () |