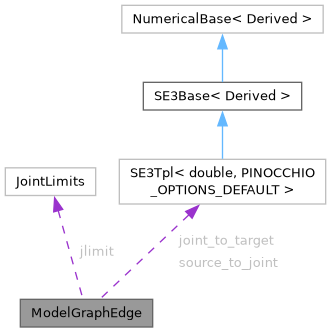
Represents an edge (joint) in the model graph. More...
#include <pinocchio/parsers/graph/model-graph.hpp>
Public Attributes | |
| bool | forward = true |
| boolean to know if we are in a forward or backward edge | |
| JointLimits | jlimit |
| All the limits of the joint. | |
| JointVariant | joint |
| What is the type of the joint. | |
| SE3 | joint_to_target |
| Transformation from edge to next vertex. | |
| std::string | name |
| Unique name of the joint. | |
| SE3 | source_to_joint |
| Transformation from the previous vertex to edge. | |
Represents an edge (joint) in the model graph.
Definition at line 51 of file model-graph.hpp.
| bool forward = true |
boolean to know if we are in a forward or backward edge
Definition at line 73 of file model-graph.hpp.
| JointLimits jlimit |
All the limits of the joint.
Definition at line 60 of file model-graph.hpp.
| JointVariant joint |
What is the type of the joint.
Definition at line 57 of file model-graph.hpp.
| SE3 joint_to_target |
Transformation from edge to next vertex.
Correspond to the transformation from the current joint to its supported body.
Definition at line 70 of file model-graph.hpp.
| std::string name |
Unique name of the joint.
Definition at line 54 of file model-graph.hpp.
| SE3 source_to_joint |
Transformation from the previous vertex to edge.
Correspond to the transformation from body supporting joint to said joint
Definition at line 65 of file model-graph.hpp.
