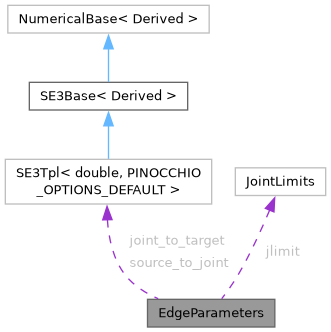
Structure that holds all the parameters useful to create an edge. More...
#include <pinocchio/parsers/graph/model-graph.hpp>
Public Member Functions | |
| EdgeParameters ()=default | |
| Default Constructor. | |
| EdgeParameters (const std::string &jname, const std::string &source_name, const SE3 &source_to_joint, const std::string &target_name, const SE3 &joint_to_target, const JointVariant &joint, const boost::optional< Eigen::VectorXd > q_ref=boost::none) | |
| Constructor with all parameters. | |
Public Attributes | |
| JointLimits | jlimit |
| JointVariant | joint = JointFixed() |
| Type of joint for edge. | |
| SE3 | joint_to_target = SE3::Identity() |
| Placement of target wrt edge. | |
| std::string | name |
| Edge name. | |
| boost::optional< Eigen::VectorXd > | q_ref = boost::none |
| Bias for the joint. | |
| SE3 | source_to_joint = SE3::Identity() |
| Placement of Edge wrt source vertex. | |
| std::string | source_vertex |
| Source name. | |
| std::string | target_vertex |
| Target name. | |
Structure that holds all the parameters useful to create an edge.
Definition at line 164 of file model-graph.hpp.
| JointLimits jlimit |
Definition at line 184 of file model-graph.hpp.
| JointVariant joint = JointFixed() |
Type of joint for edge.
Definition at line 179 of file model-graph.hpp.
| SE3 joint_to_target = SE3::Identity() |
Placement of target wrt edge.
Definition at line 176 of file model-graph.hpp.
| std::string name |
Edge name.
Definition at line 167 of file model-graph.hpp.
| boost::optional<Eigen::VectorXd> q_ref = boost::none |
Bias for the joint.
Definition at line 182 of file model-graph.hpp.
| SE3 source_to_joint = SE3::Identity() |
Placement of Edge wrt source vertex.
Definition at line 172 of file model-graph.hpp.
| std::string source_vertex |
Source name.
Definition at line 170 of file model-graph.hpp.
| std::string target_vertex |
Target name.
Definition at line 174 of file model-graph.hpp.
