Builder interface to add an edge to the graph. Allows for an easy customization of the edge. More...
#include <pinocchio/parsers/graph/model-graph.hpp>
Public Member Functions | |
| EdgeBuilder (ModelGraph &graph) | |
| Constructor. | |
| void | build () |
| Add the edge to the ModelGraph. | |
| EdgeBuilder & | withArmature (const Eigen::VectorXd &armature_) |
| Specify armature. | |
| EdgeBuilder & | withDamping (const Eigen::VectorXd &damping_) |
| Specify damping. | |
| EdgeBuilder & | withFriction (const Eigen::VectorXd &friction_) |
| Specify friction. | |
| EdgeBuilder & | withFrictionLoss (const double frictionLoss_) |
| Specify friction loss. | |
| EdgeBuilder & | withJointType (const JointVariant &jtype) |
| Specify the type of joint for the edge. Default : Fixed. | |
| EdgeBuilder & | withMaxConfig (const Eigen::VectorXd &maxConfig_) |
| Specify limit maxConfig. | |
| EdgeBuilder & | withMaxEffort (const Eigen::VectorXd &maxEffort_) |
| Specify limit maxEffort. | |
| EdgeBuilder & | withMaxVel (const Eigen::VectorXd &maxVel_) |
| Specify limit maxVel. | |
| EdgeBuilder & | withMinConfig (const Eigen::VectorXd &minConfig_) |
| Specify limit minConfig. | |
| EdgeBuilder & | withName (const std::string &name) |
| Specify the name of the edge. | |
| EdgeBuilder & | withQref (const Eigen::VectorXd &qref) |
| Specify a bias for the joint configuration. | |
| EdgeBuilder & | withSourcePose (const SE3 &source_pose) |
| Specify the pose of the joint wrt the source vertex. Default : Identity. | |
| EdgeBuilder & | withSourceVertex (const std::string &source_name) |
| Specify the name of the source vertex. | |
| EdgeBuilder & | withTargetPose (const SE3 &target_pose) |
| Specify the pose of target vertex wrt edge. Default : Identity. | |
| EdgeBuilder & | withTargetVertex (const std::string &target_name) |
| Specify the name of the target vertex. | |
Public Attributes | |
| boost::optional< Eigen::VectorXd > | armature |
| boost::optional< Eigen::VectorXd > | damping |
| boost::optional< Eigen::VectorXd > | friction |
| double | frictionLoss = 0 |
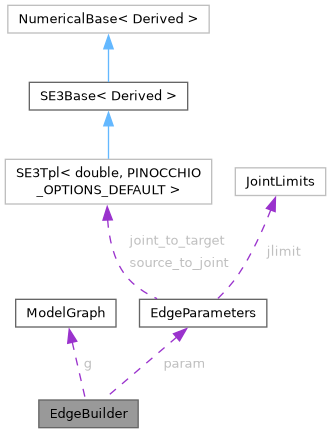
| ModelGraph & | g |
| ModelGraph to which the edge will be added. | |
| boost::optional< Eigen::VectorXd > | maxConfig |
| boost::optional< Eigen::VectorXd > | maxEffort |
| boost::optional< Eigen::VectorXd > | maxVel |
| boost::optional< Eigen::VectorXd > | minConfig |
| EdgeParameters | param |
| Parameters of the edge. | |
Builder interface to add an edge to the graph. Allows for an easy customization of the edge.
Definition at line 202 of file model-graph.hpp.
| inlineexplicit |
Constructor.
Definition at line 221 of file model-graph.hpp.
| inline |
Specify armature.
Definition at line 314 of file model-graph.hpp.
| inline |
Specify damping.
Definition at line 307 of file model-graph.hpp.
| inline |
Specify friction.
Definition at line 300 of file model-graph.hpp.
| inline |
Specify friction loss.
Definition at line 321 of file model-graph.hpp.
| inline |
Specify the type of joint for the edge. Default : Fixed.
Definition at line 227 of file model-graph.hpp.
| inline |
Specify limit maxConfig.
Definition at line 279 of file model-graph.hpp.
| inline |
Specify limit maxEffort.
Definition at line 293 of file model-graph.hpp.
| inline |
Specify limit maxVel.
Definition at line 286 of file model-graph.hpp.
| inline |
Specify limit minConfig.
Definition at line 272 of file model-graph.hpp.
| inline |
Specify the name of the edge.
Definition at line 234 of file model-graph.hpp.
| inline |
Specify a bias for the joint configuration.
Definition at line 265 of file model-graph.hpp.
| inline |
Specify the pose of the joint wrt the source vertex. Default : Identity.
Definition at line 258 of file model-graph.hpp.
| inline |
Specify the name of the source vertex.
Definition at line 246 of file model-graph.hpp.
| inline |
Specify the pose of target vertex wrt edge. Default : Identity.
Definition at line 252 of file model-graph.hpp.
| inline |
Specify the name of the target vertex.
Definition at line 240 of file model-graph.hpp.
| boost::optional<Eigen::VectorXd> armature |
Definition at line 214 of file model-graph.hpp.
| boost::optional<Eigen::VectorXd> damping |
Definition at line 216 of file model-graph.hpp.
| boost::optional<Eigen::VectorXd> friction |
Definition at line 215 of file model-graph.hpp.
| double frictionLoss = 0 |
Definition at line 218 of file model-graph.hpp.
| ModelGraph& g |
ModelGraph to which the edge will be added.
Definition at line 205 of file model-graph.hpp.
| boost::optional<Eigen::VectorXd> maxConfig |
Definition at line 211 of file model-graph.hpp.
| boost::optional<Eigen::VectorXd> maxEffort |
Definition at line 213 of file model-graph.hpp.
| boost::optional<Eigen::VectorXd> maxVel |
Definition at line 212 of file model-graph.hpp.
| boost::optional<Eigen::VectorXd> minConfig |
Definition at line 210 of file model-graph.hpp.
| EdgeParameters param |
Parameters of the edge.
Definition at line 208 of file model-graph.hpp.
