A rigid body system is an assembly of different parts which are joints, rigid bodies and forces. A joint connects two different bodies and gather all kinematic relations between those two bodies, allowing the creation of a relative displacement between the two bodies. This displacement is described by breaking it down into three parts: rotations, translations or the compositions of a rotation and a translation.
Rotation matrices form the so-called Special Orthogonal group 


The set that brings together all the homogeneous transformations matrices is the Special Euclidean group 


To use quaternions for a
Or we can just consider one rotation instead of two. For example, in a landmark link to the robot itself, we consider the starting position as the origin of this landmark.
So let's consider a cube in the 3-dimensional space.
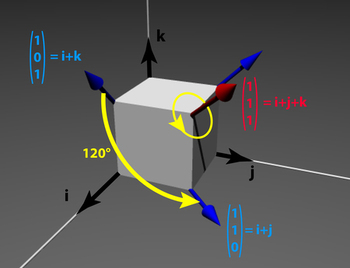
We want to determine the image of a vector 





We compute the corresponding quaternion:

Therefore we have:

And so we can compute the image of vector

we have:

Determining the matrix corresponding to a rotation is not immediate, so that very often the physical problem is defined by the couple 
Of course the cartesian product is essential for analysis and description of the movement in our Euclidean space. But here, it's specific to the Lie algebra, this is different from the cartesian product which define our space. The cartesian product can also be used to create a specific space by associating spaces related to the Lie algebra as
For example let's consider a wheeled robot like Tiago. It can only move on the ground. It is possible to assimilate the ground to a plane. The robot can rotate around the z-axis so we have to deal with a
If you want to create a tangent space to simplify calculations of a trajectory, it is necessary to use vector spaces. Indeed, a tangent space is a vector space that is the set of all velocity vectors. Let's consider an object having a trajectory, all points of it have a velocity which is tangent to the trajectory and the space associate to one velocity and passing by one point of the trajectory is the tangent space.
Furthermore, by using vector spaces we have the possibility to use its properties as those of the Euclidean cross operator and linear combinations. However it is important to know that "vector space" is here related to Lie algebra and this is different for a vector space we used to deal with.
