Loading...
Searching...
No Matches
hpp::pinocchio::CollisionGeometry Class Referenceabstract
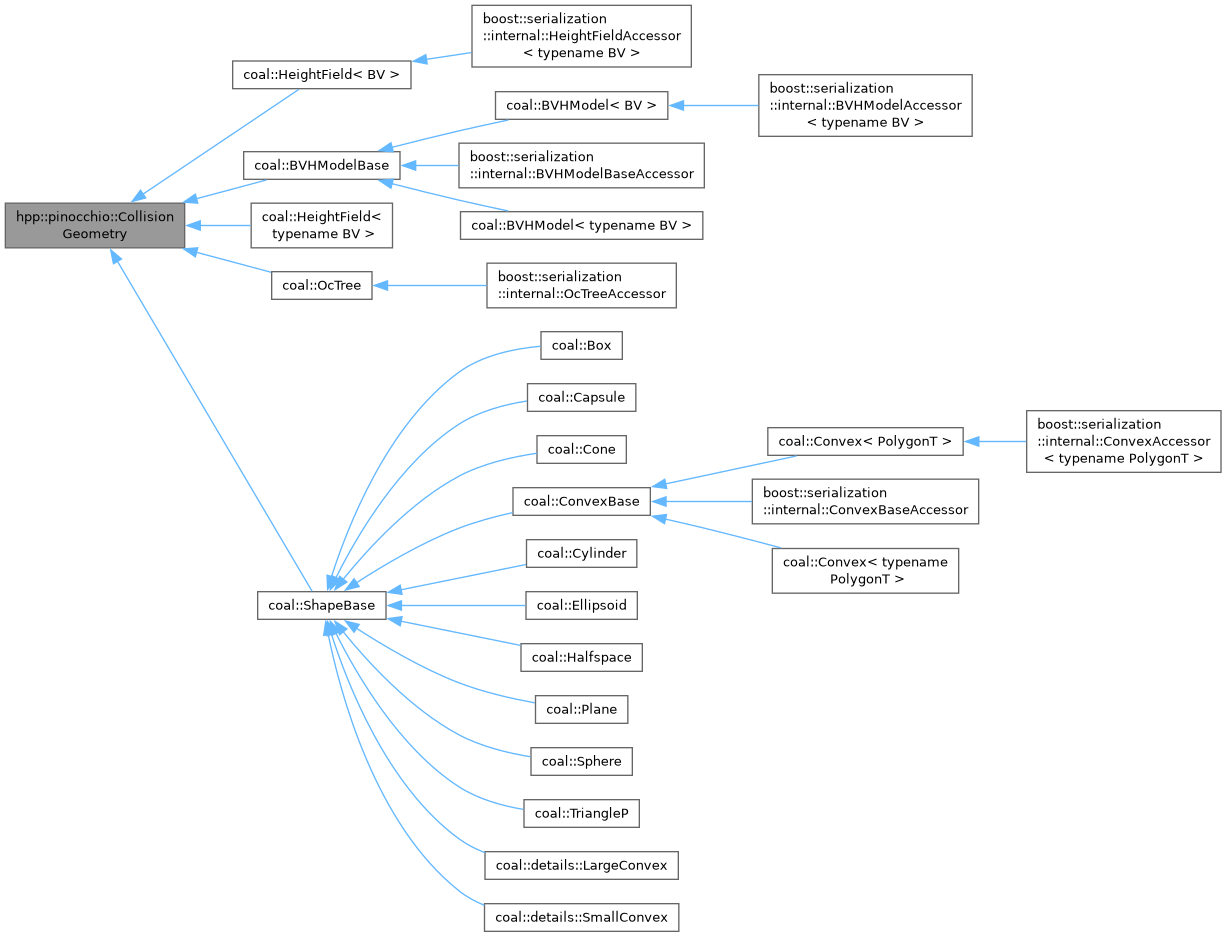
Inheritance diagram for hpp::pinocchio::CollisionGeometry:
Collaboration diagram for hpp::pinocchio::CollisionGeometry:
Public Member Functions | |
| CollisionGeometry () | |
| CollisionGeometry &other)=default | |
| virtual | ~CollisionGeometry () |
| virtual clone () const =0 | |
| bool | CollisionGeometry &other) const |
| bool | CollisionGeometry &other) const |
| virtual getObjectType () const | |
| virtual getNodeType () const | |
| virtual void | computeLocalAABB ()=0 |
| void * | getUserData () const |
| void | setUserData (void *data) |
| bool | isOccupied () const |
| bool | isFree () const |
| bool | isUncertain () const |
| virtual computeCOM () const | |
| virtual computeMomentofInertia () const | |
| virtual computeVolume () const | |
| virtual computeMomentofInertiaRelatedToCOM () const | |
Public Attributes | |
| aabb_center | |
| aabb_radius | |
| AABB | aabb_local |
| void * | user_data |
| cost_density | |
| threshold_occupied | |
| threshold_free | |
The documentation for this class was generated from the following files: