Loading...
Searching...
No Matches
helper.hh File Reference
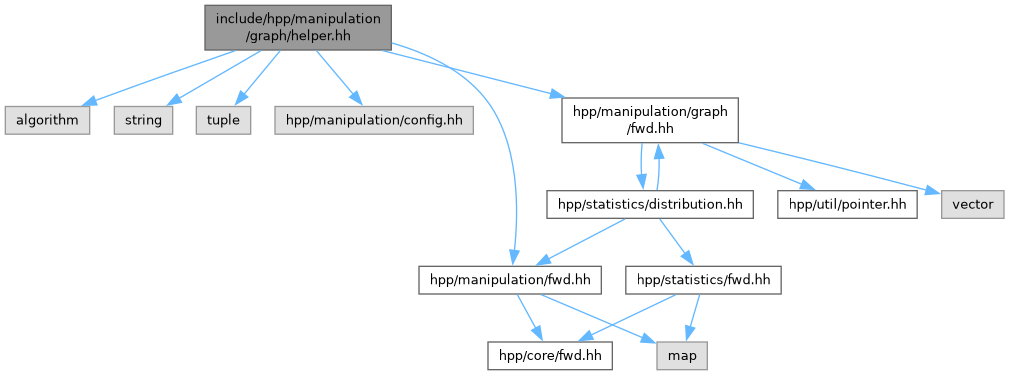
#include <algorithm>#include <string>#include <tuple>#include "hpp/manipulation/config.hh"#include "hpp/manipulation/fwd.hh"#include "hpp/manipulation/graph/fwd.hh"Include dependency graph for helper.hh:
Go to the source code of this file.
Classes | |
| struct | hpp::manipulation::graph::helper::FoliatedManifold |
| struct | hpp::manipulation::graph::helper::Rule |
| struct | hpp::manipulation::graph::helper::ObjectDef_t |
Namespaces | |
| namespace | hpp |
| namespace | hpp::manipulation |
| namespace | hpp::manipulation::graph |
| namespace | hpp::manipulation::graph::helper |
Typedefs | |
| typedef std::vector< Rule > | hpp::manipulation::graph::helper::Rules_t |
| typedef std::tuple< ImplicitPtr_t, LockedJoints_t > | hpp::manipulation::graph::helper::PlacementConstraint_t |
| typedef std::vector< HandlePtr_t > | hpp::manipulation::graph::helper::Handles_t |
| typedef std::vector< GripperPtr_t > | hpp::manipulation::graph::helper::Grippers_t |
| typedef std::tuple< PlacementConstraint_t, Handles_t, std::size_t > | hpp::manipulation::graph::helper::Object_t |
| typedef std::vector< Object_t > | hpp::manipulation::graph::helper::Objects_t |
Enumerations | |
| enum | hpp::manipulation::graph::helper::GraspingCase { hpp::manipulation::graph::helper::NoGrasp = 1 << 0 , hpp::manipulation::graph::helper::GraspOnly = 1 << 1 , hpp::manipulation::graph::helper::WithPreGrasp = 1 << 2 } |
| enum | hpp::manipulation::graph::helper::PlacementCase { hpp::manipulation::graph::helper::NoPlace = 1 << 3 , hpp::manipulation::graph::helper::PlaceOnly = 1 << 4 , hpp::manipulation::graph::helper::WithPrePlace = 1 << 5 } |