#include <hpp/core/steering-method.hh>
Public Member Functions | |
| PathPtr_t | operator() (ConfigurationIn_t q1, ConfigurationIn_t q2) const |
| PathPtr_t | steer (ConfigurationIn_t q1, ConfigurationIn_t q2) const |
| virtual | ~SteeringMethod () |
| virtual SteeringMethodPtr_t | copy () const =0 |
| Copy instance and return shared pointer. | |
| ProblemConstPtr_t | problem () const |
Constraints applicable to the robot. | |
These constraints are not automatically taken into account. Child class can use it if they need. | |
| void | constraints (const ConstraintSetPtr_t &constraints) |
| Set constraint set. | |
| const ConstraintSetPtr_t & | constraints () const |
| Get constraint set. | |
Protected Member Functions | |
| SteeringMethod (const ProblemConstPtr_t &problem) | |
| Constructor. | |
| SteeringMethod (const SteeringMethod &other) | |
| virtual PathPtr_t | impl_compute (ConfigurationIn_t q1, ConfigurationIn_t q2) const =0 |
| create a path between two configurations | |
| void | init (SteeringMethodWkPtr_t weak) |
| Store weak pointer to itself. | |
Detailed Description
Steering method
A steering method creates paths between pairs of configurations for a robot. They are usually used to take into account nonholonomic constraints of some robots
Constructor & Destructor Documentation
◆ ~SteeringMethod()
| inlinevirtual |
◆ SteeringMethod() [1/2]
| inlineprotected |
Constructor.
◆ SteeringMethod() [2/2]
| inlineprotected |
Copy constructor
Constraints are copied
Member Function Documentation
◆ constraints() [1/2]
| inline |
Get constraint set.
◆ constraints() [2/2]
| inline |
Set constraint set.
◆ copy()
| pure virtual |
Copy instance and return shared pointer.
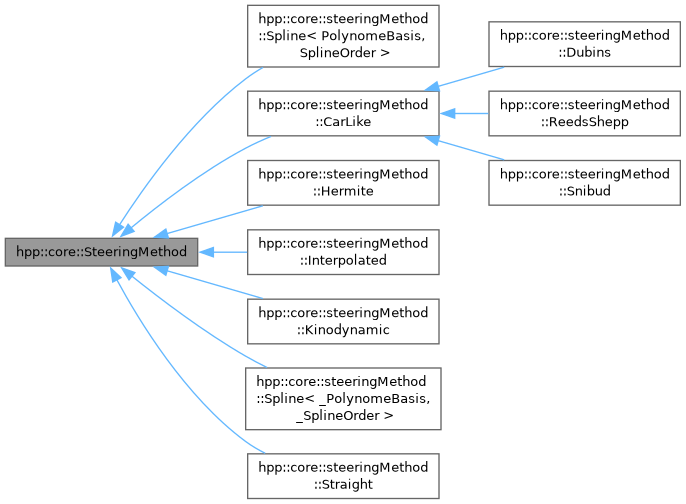
Implemented in hpp::core::steeringMethod::Dubins, hpp::core::steeringMethod::Hermite, hpp::core::steeringMethod::Interpolated, hpp::core::steeringMethod::Kinodynamic, hpp::core::steeringMethod::ReedsShepp, hpp::core::steeringMethod::Snibud, hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder >, hpp::core::steeringMethod::Spline< PolynomeBasis, SplineOrder >, and hpp::core::steeringMethod::Straight.
◆ impl_compute()
| protectedpure virtual |
create a path between two configurations
Implemented in hpp::core::steeringMethod::Dubins, hpp::core::steeringMethod::Hermite, hpp::core::steeringMethod::Interpolated, hpp::core::steeringMethod::Kinodynamic, hpp::core::steeringMethod::ReedsShepp, hpp::core::steeringMethod::Snibud, hpp::core::steeringMethod::Spline< _PolynomeBasis, _SplineOrder >, hpp::core::steeringMethod::Spline< PolynomeBasis, SplineOrder >, and hpp::core::steeringMethod::Straight.
◆ init()
| inlineprotected |
Store weak pointer to itself.
◆ operator()()
| inline |
◆ problem()
| inline |
◆ steer()
| inline |
The documentation for this class was generated from the following file:
- include/hpp/core/steering-method.hh