Loading...
Searching...
No Matches
cop_stabilizer.hpp File Reference
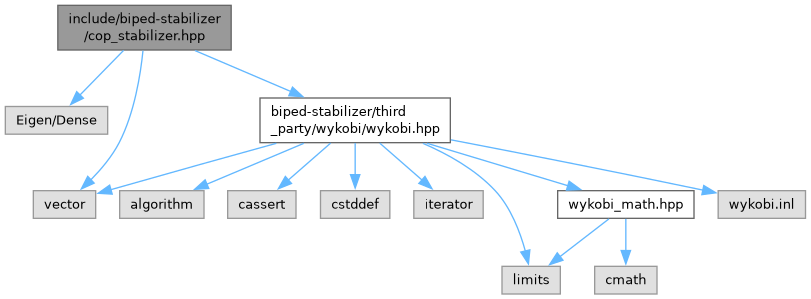
Include dependency graph for cop_stabilizer.hpp:
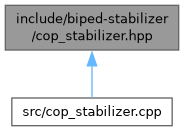
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | biped_stabilizer::CopStabilizerSettings |
| class | biped_stabilizer::CopStabilizer |
Namespaces | |
| namespace | biped_stabilizer |
Typedefs | |
| typedef wykobi::polygon< double, 2 > | biped_stabilizer::Polygon2D |
| typedef Eigen::Matrix< double, 2, 1 > | biped_stabilizer::eVector2 |
| typedef Eigen::Matrix< double, 3, 1 > | biped_stabilizer::eVector3 |
| typedef Eigen::Matrix< double, 6, 1 > | biped_stabilizer::eVector6 |
| typedef Eigen::Isometry3d | biped_stabilizer::eMatrixHom |
| typedef Eigen::Matrix3d | biped_stabilizer::eMatrixRot |
| typedef std::vector< eMatrixHom, Eigen::aligned_allocator< eMatrixHom > > | biped_stabilizer::eMatrixHoms |
| typedef std::vector< eVector2, Eigen::aligned_allocator< eVector2 > > | biped_stabilizer::eVector2s |
| typedef std::vector< eVector3, Eigen::aligned_allocator< eVector3 > > | biped_stabilizer::eVector3s |